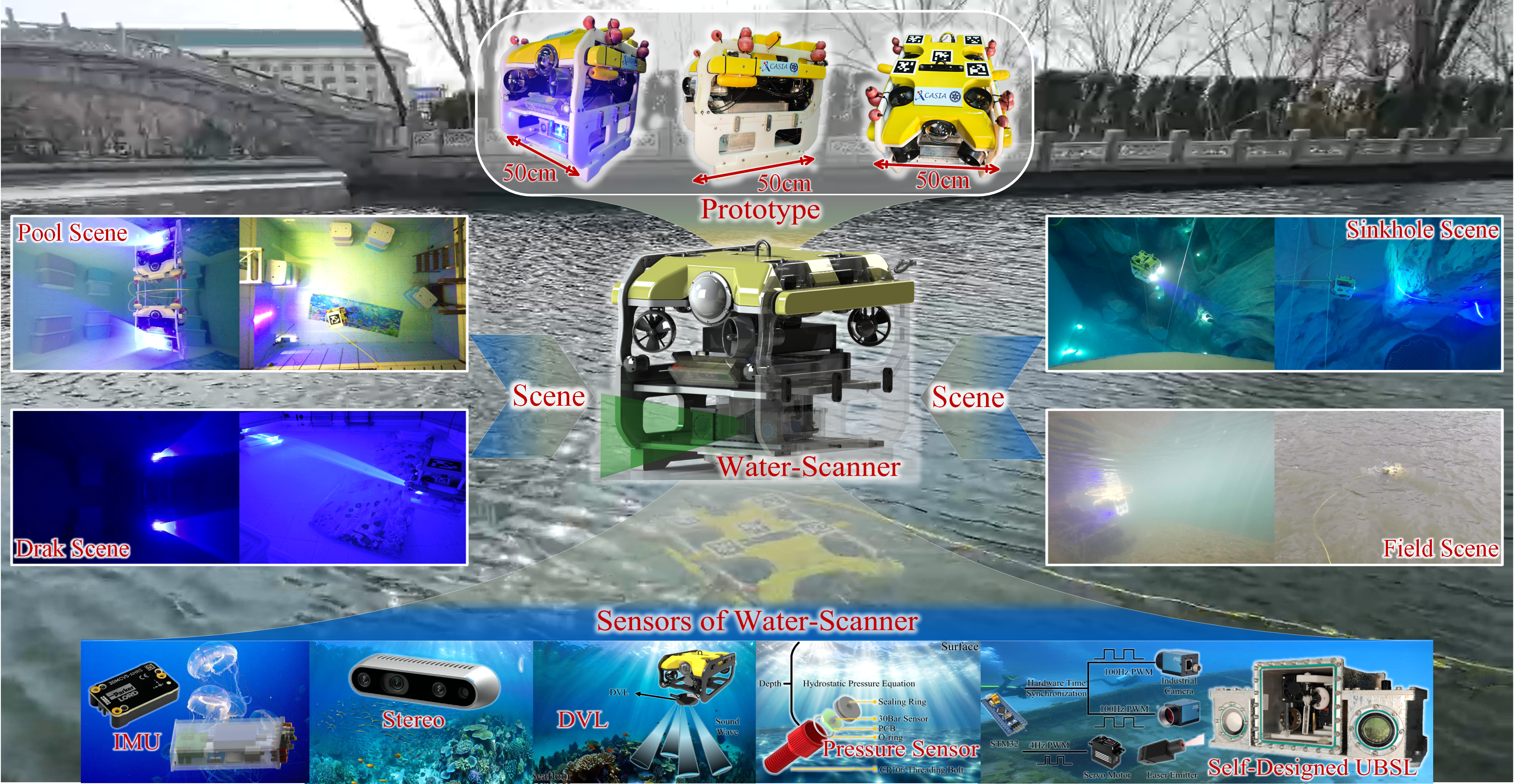
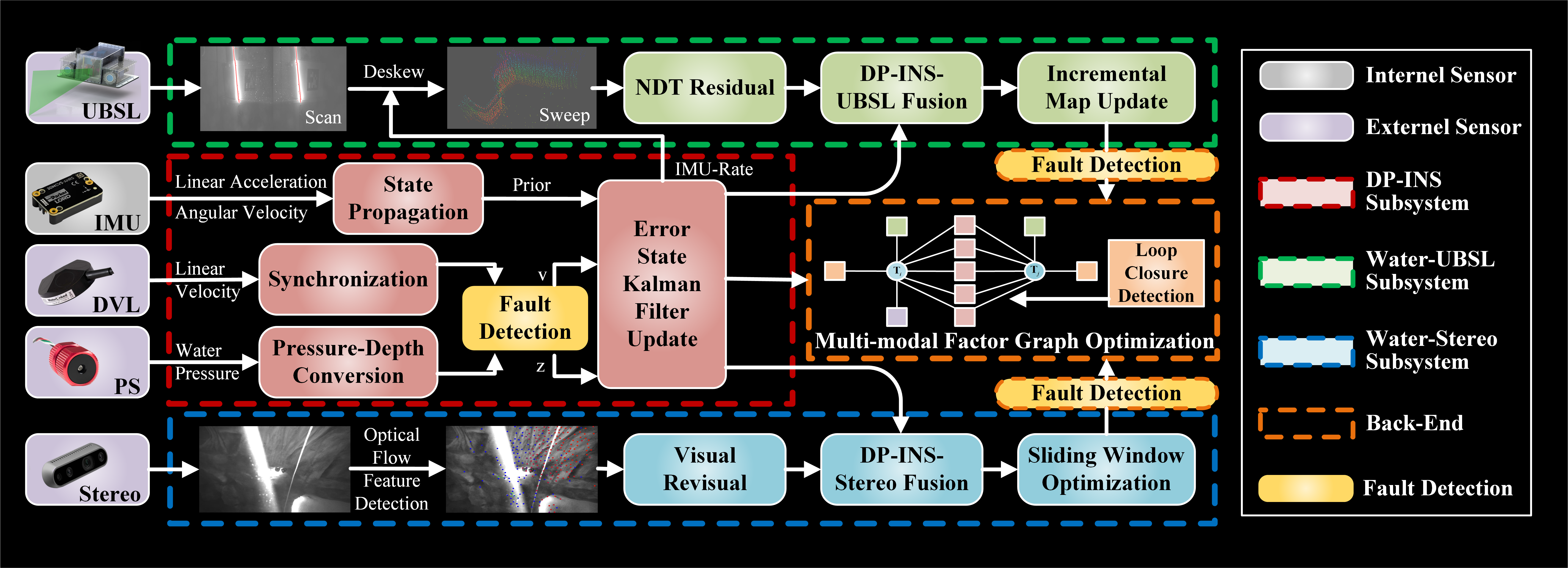
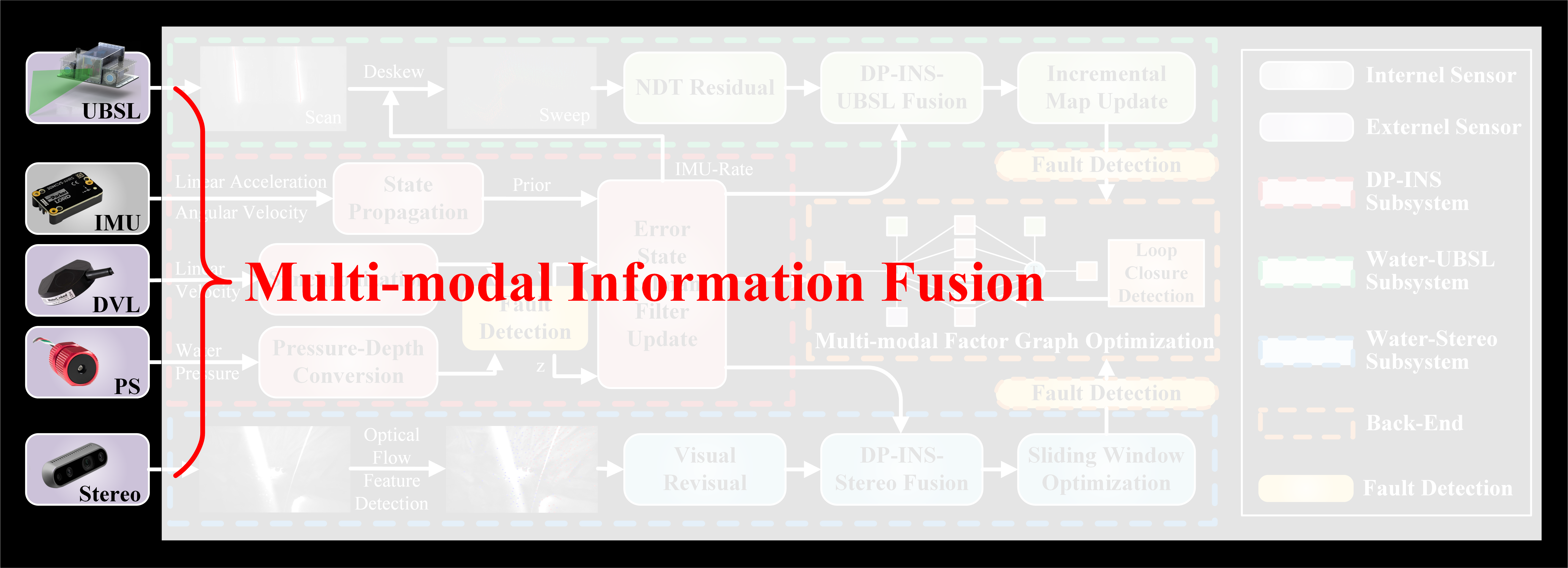
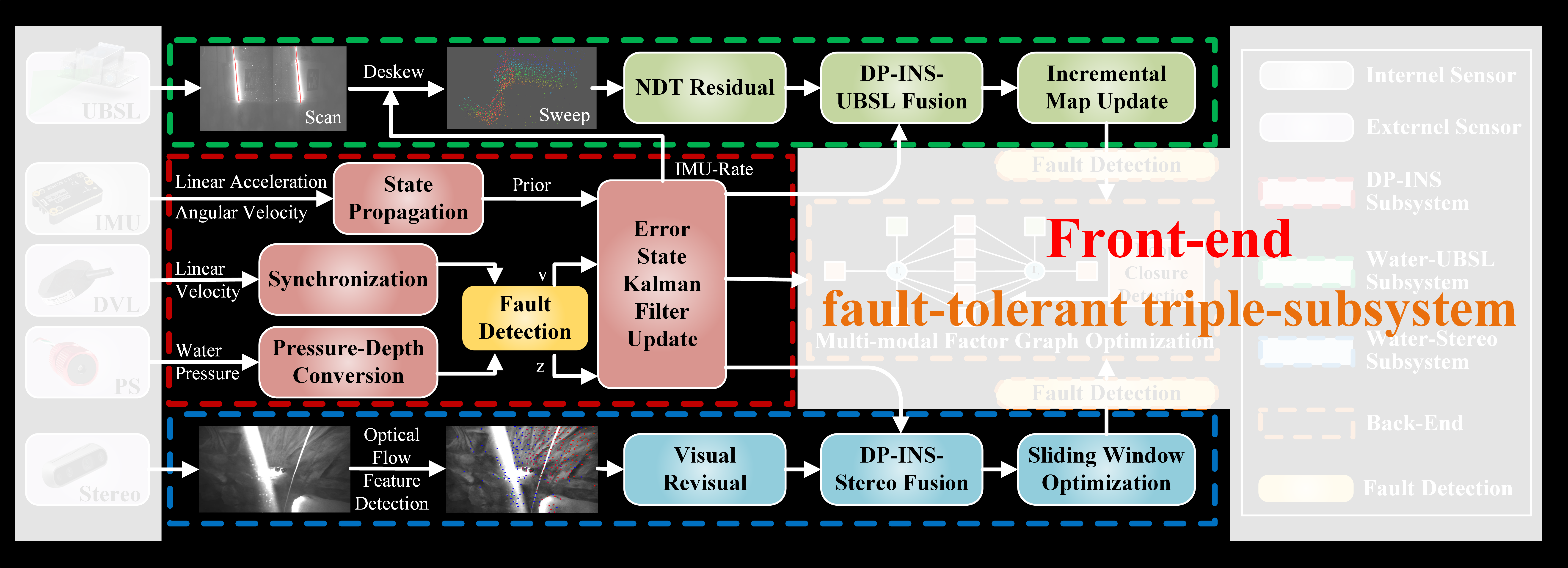
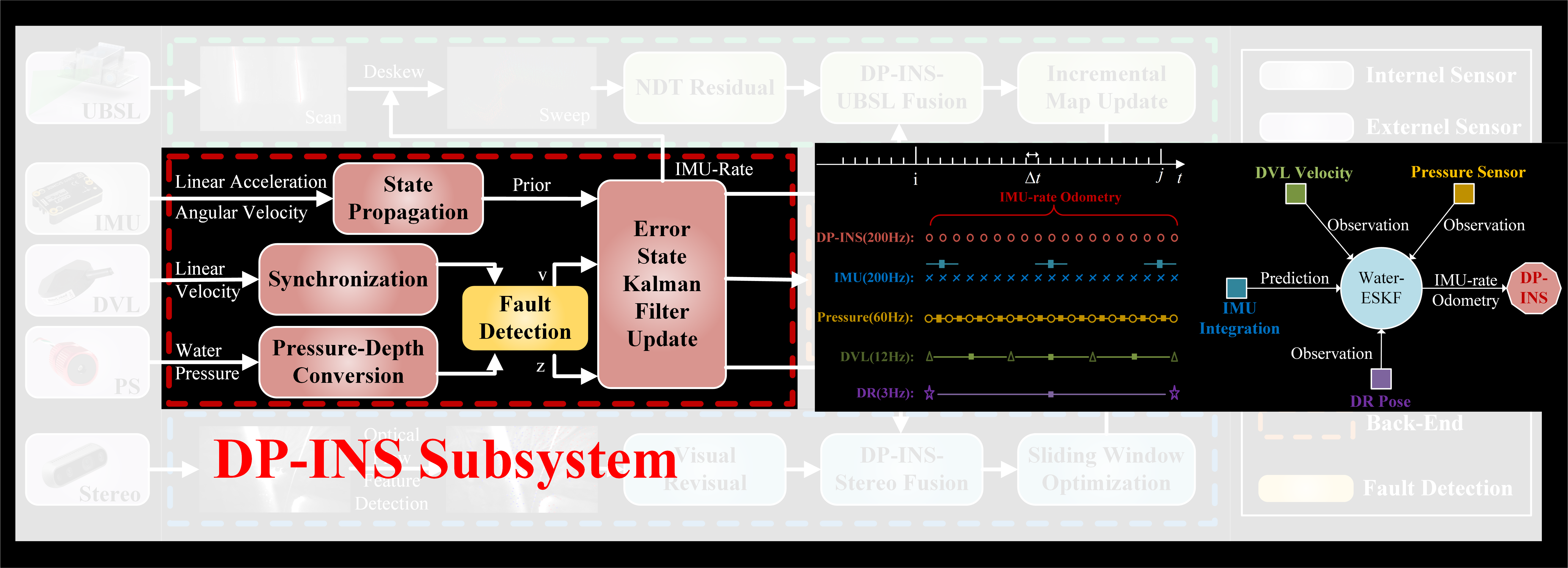
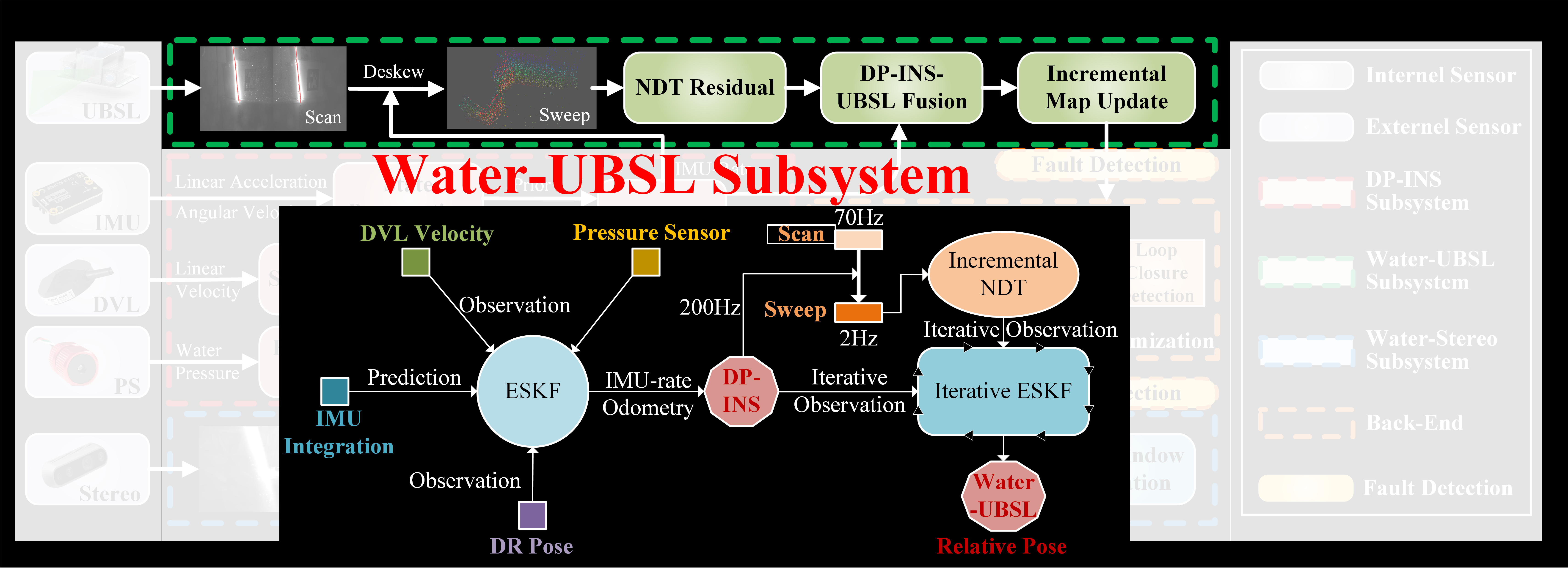
Existing underwater SLAM systems often struggle to operate reliably in underwater environments with weak texture and degraded geometry, resulting in intermittent tracking and sparse mapping. Therefore, we present Water-DSLAM, a novel laser-aided multi-modal information fusion system that can achieve uninterrupted dense SLAM capable of continuous observation in diverse complex underwater scenarios. First, we develop Water-Scanner, a multi-sensor fusion robotic platform featuring a proprietary Underwater Binocular Structured Light (UBSL) module that enables accurate 3D perception to collect data. Then, a triple-subsystem front end architecture is proposed, where the DP-INS subsystem provides a high update rate for motion estimation and is tightly coupled with the Water-Stereo subsystem to enhance performance in poor visual feature environments, as well as with the Water-UBSL subsystem to improve robustness in structurally degraded scenarios. Furthermore, a multi-modal factor graph back end is introduced to dynamically fuse heterogeneous sensor data. The proposed factor graph maintenance strategy effectively handles asynchronous sensor frequencies and partial data loss. Experimental results demonstrate that Water-DSLAM achieves superior localization accuracy and robustness, maintaining a 100% continuity ratio during partial sensor dropout. It also generates dense maps at 7432.6 points/m3, approximately eight times denser than existing methods. These results were consistently validated in multiple challenging environments, including an artificial pool, a 16-meter-deep sinkhole, a natural river, and an offshore zone of the South China Sea. This work represents the first complete solution for continuous underwater robotic dense in-situ observation.






Ablation Experiment: Multi-Subsystem Ablation Verification
Comparative Experiment: Free-Motion Dense Mapping in Pool
Application Experiment 1: Underwater Dark Scene In-situ Observation
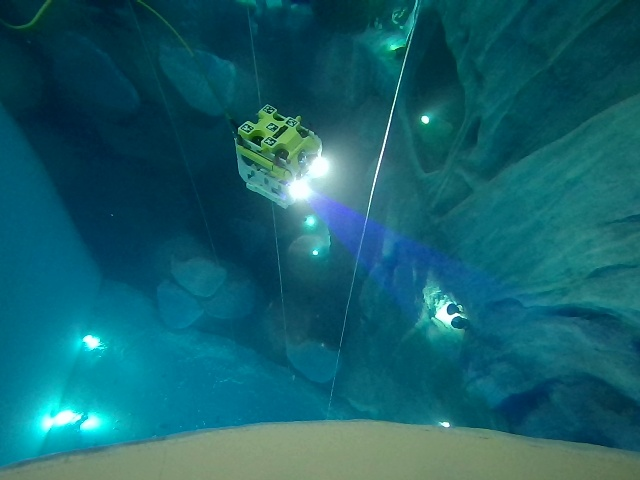
Application Experiment 2: Underwater Sinkhole In-situ Observation
Application Experiment 3: Field River In-situ Observation
Application Experiment 4: Offsore Seabed In-situ Observation
Will come later..

