Passive, active, and neuromorphic vision with IMU, DVL, and pressure sensors for robust perception
Dense Point Cloud
High-fidelity dense point clouds
acquired by a 3D laser scanner
for mapping evaluation
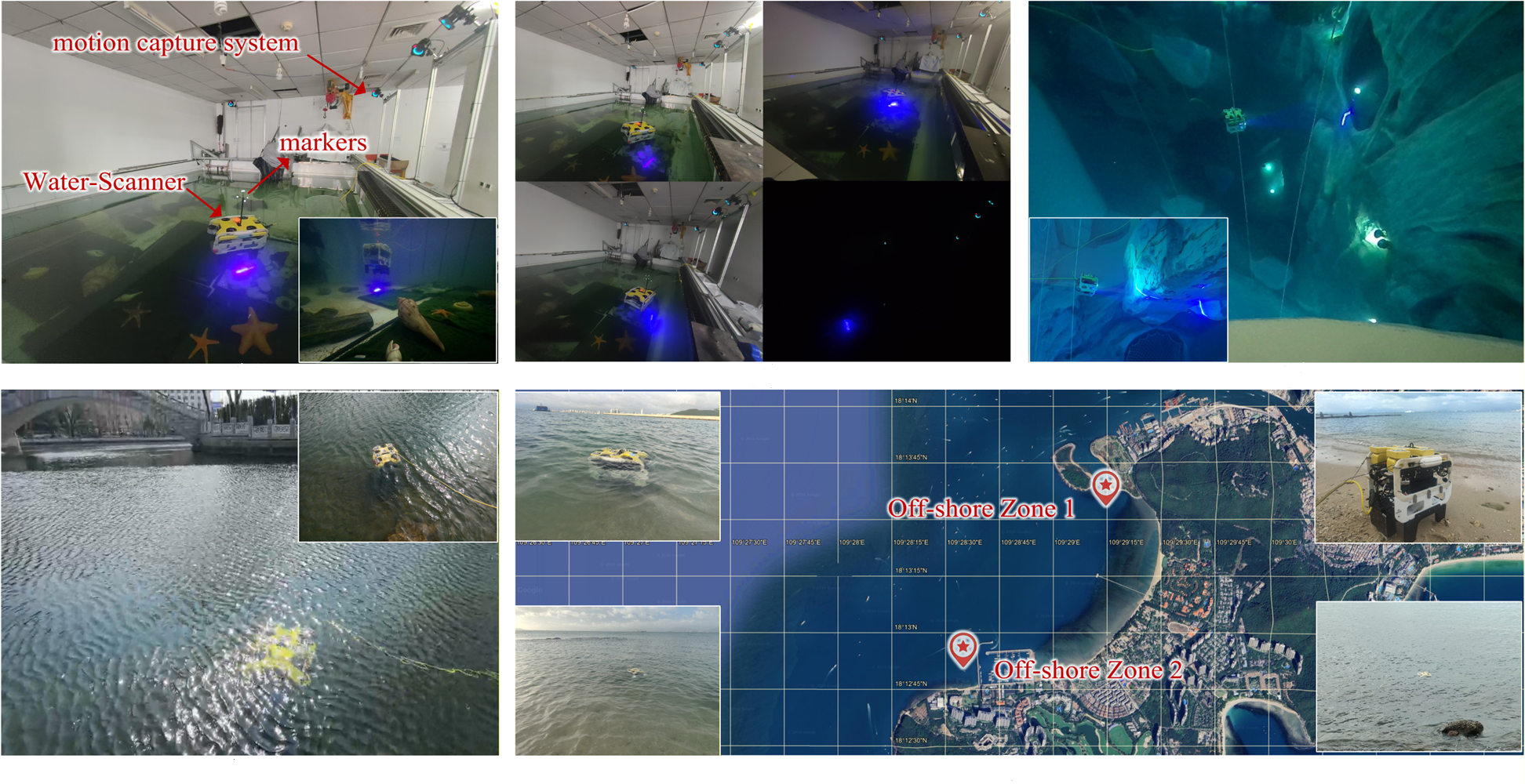
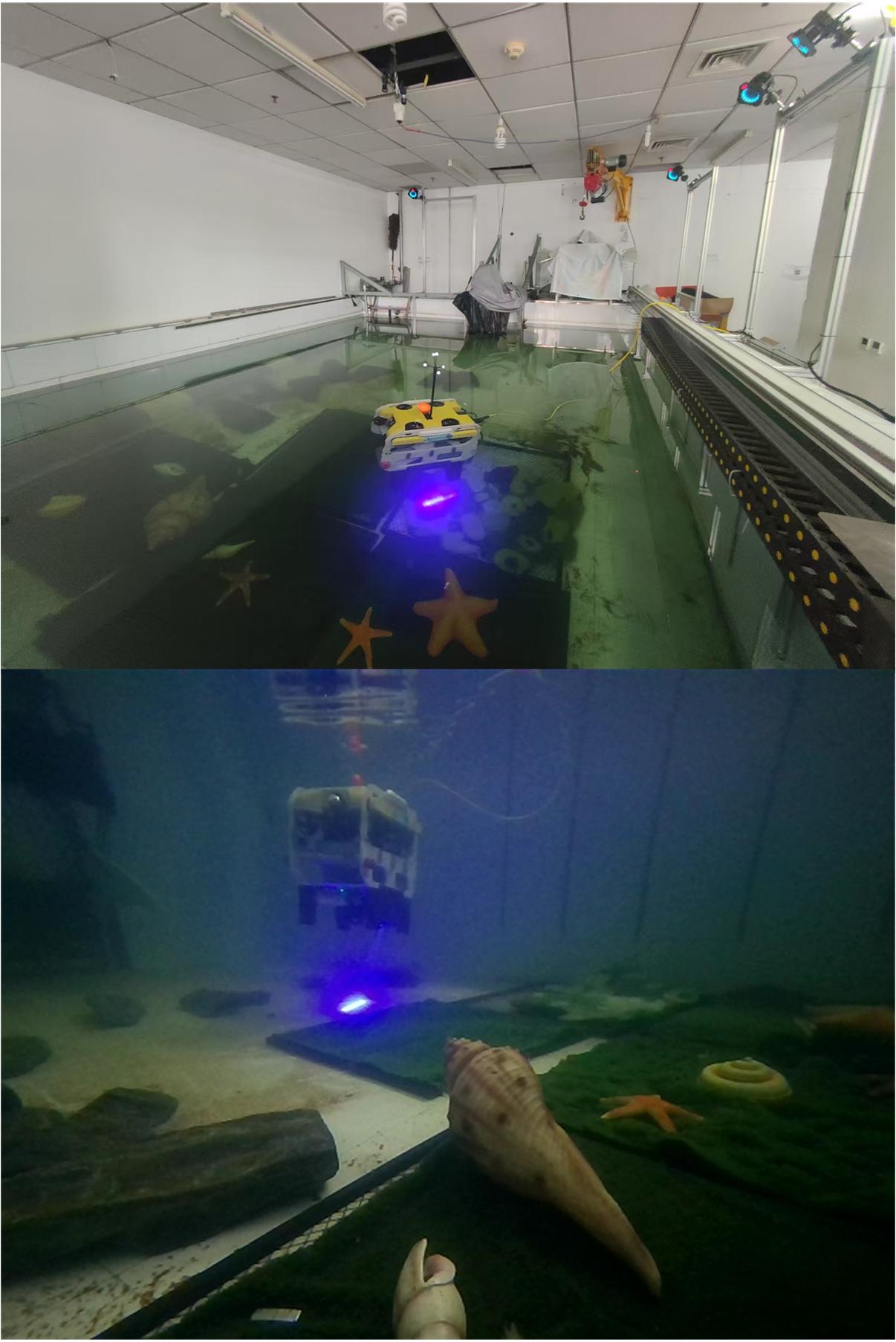
Accurate Localization
Motion capture system (indoor)
and INS-SfM fusion (outdoor)
for localization evaluation
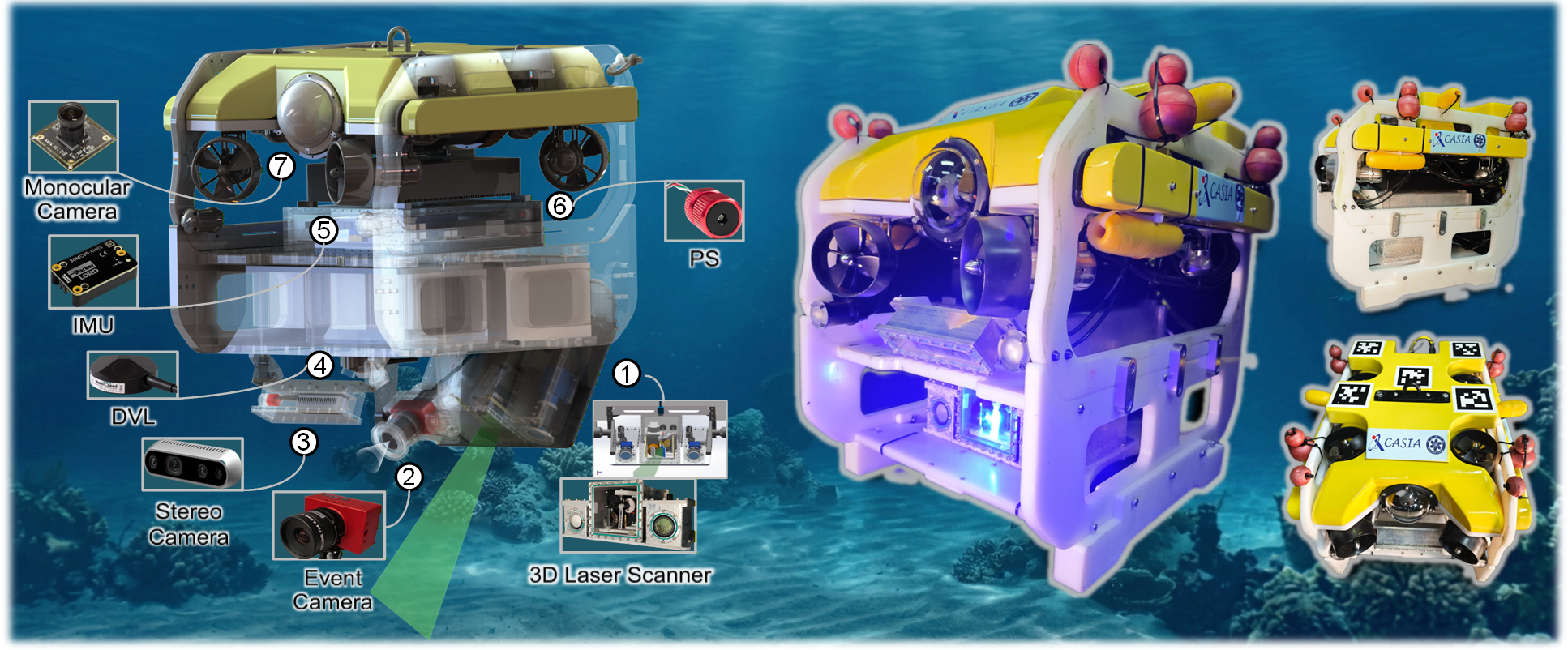
Robotic Platform and Sensor Suite
Water-Scanner: Custom-designed underwater robotic platform equipped with multi-modal sensors, including passive stereo cameras, active laser scanner, neuromorphic vision sensor, IMU, DVL, and pressure sensor. The system enables synchronized data acquisition for robust localization and high-fidelity dense mapping across diverse underwater environments.
Robot Platform
Model: FindROV H20
Weight: 23 kg
Max Depth: 300 m
Velocity: 2 knot
Cable: 100 m
AHRS
Model: 3DM-CV5-25
Freq: 100 Hz
R/P: ±0.5°
Yaw: ±1°
Mag: ±2.5 Gauss
DVL
Model: A50
Beam: 4-beam
Angle: 22.5°
Freq: 4–26 Hz
Res: 0.1 mm/s
Pressure Sensor
Model: B30
Range: 0–30 bar
Depth: 300 m
Acc: ±200 mbar
Res: 0.2 mbar
Monocular Camera
View: Front
USB RGB
Res: 1920×1080
Freq: 30 Hz
FoV: 80°×64°
Stereo Camera
View: Down
Model: D435i
Res: 640×480
Freq: 30 Hz
FoV: 87°×58°
Event Camera
Model: DAVIS346
Resolution: 346 × 260
Temporal: 1 μs
Latency: < 1 ms
Dynamic Range: 120 dB
3D Laser Scanner
Freq: 70 Hz
Points: 512
λ: 450 nm
Power: 3 W
Angle: 35°
Scenes & Downloads
Pool ~100GB
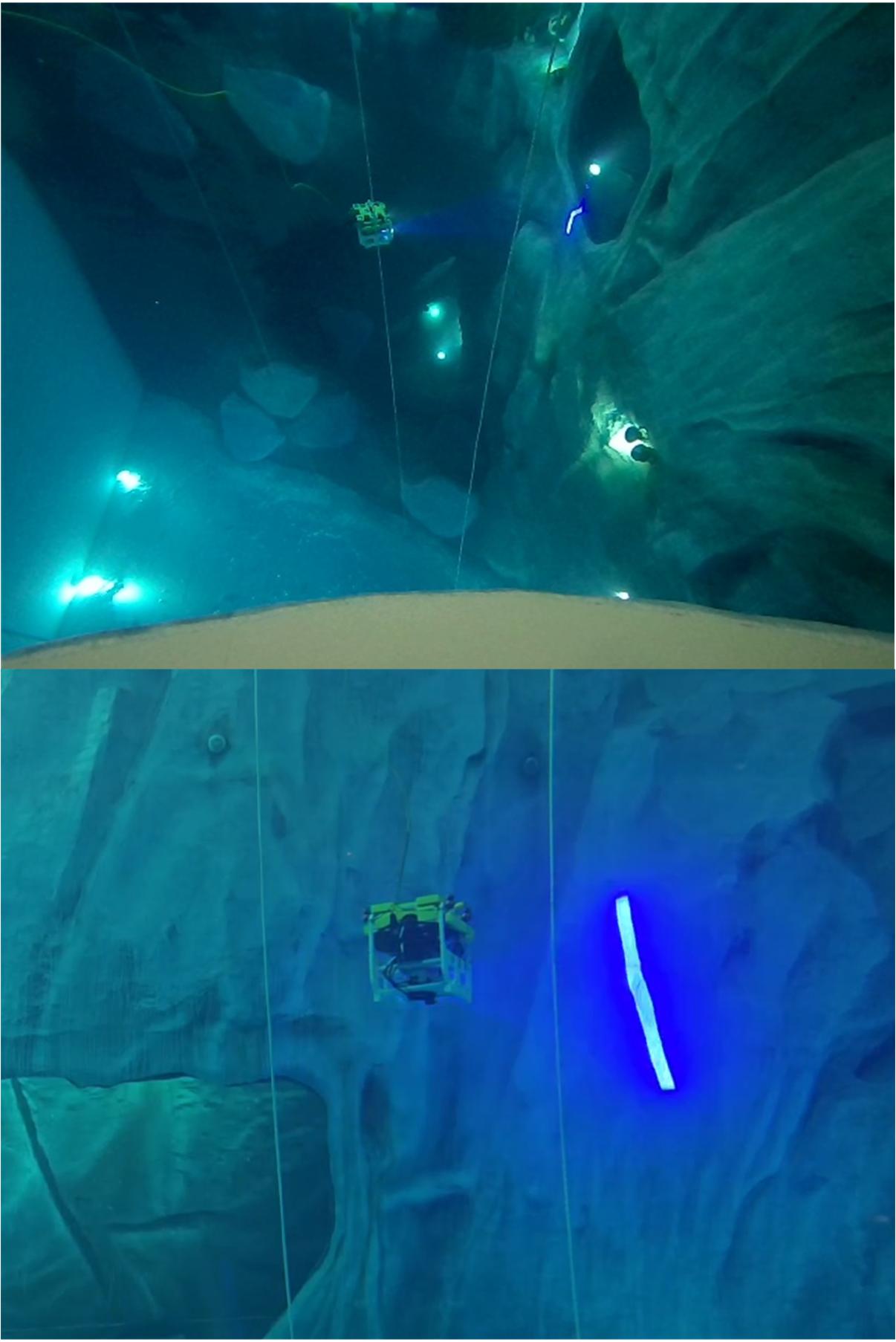
Cave ~50GB
River ~60GB
Sea ~45GB
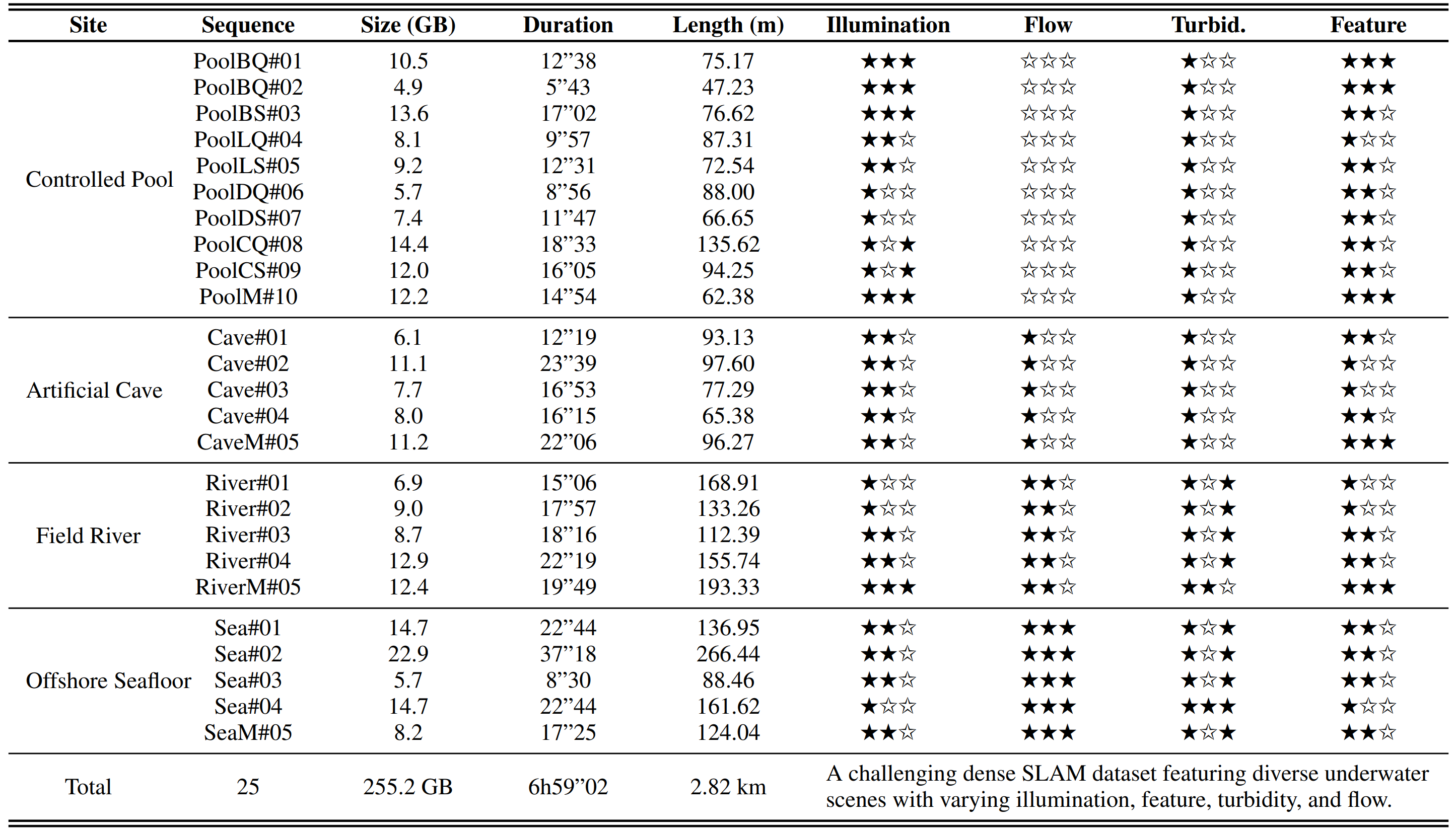
Scene-wise characteristics in the AquaTriV dataset.
Data Visualization & Format
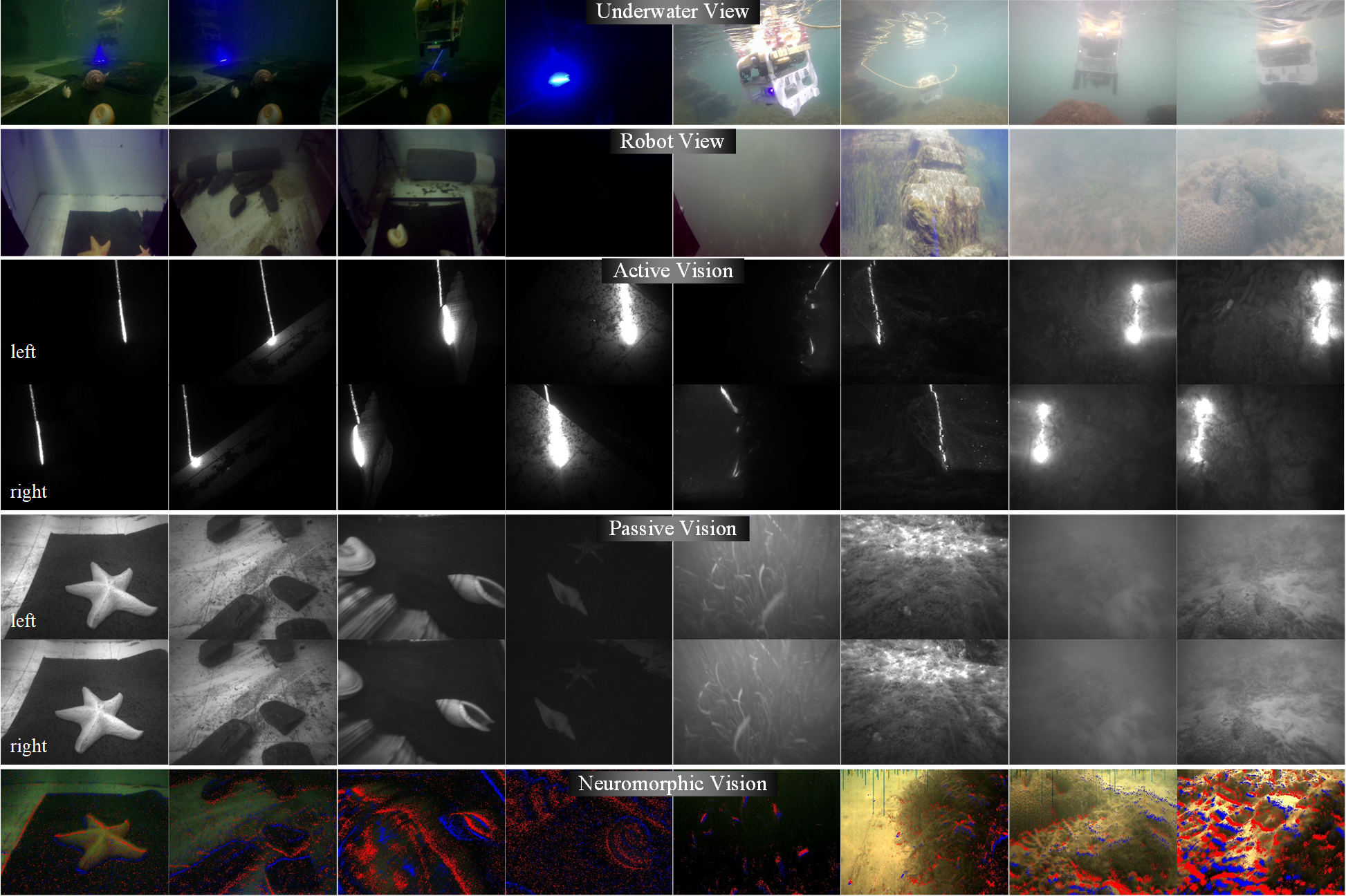
We provide multi-modal raw sensory data including active vision, passive vision, and neuromorphic vision streams, along with synchronized navigation measurements. Below shows representative visual samples and ROS topic formats.
Examples of visual raw images in the AquaTriV dataset.
Type
Topic Name
Message Type
Rate (Hz)
Active Vision
/scanner/left_image/compressed
sensor_msgs/CompressedImage
100
/scanner/right_image/compressed
sensor_msgs/CompressedImage
100
Passive Vision
/stereo/infra1/compressed
sensor_msgs/CompressedImage
30
/stereo/infra2/compressed
sensor_msgs/CompressedImage
30
/stereo/monocular/compressed
sensor_msgs/CompressedImage
30
/stereo/imu
sensor_msgs/IMU
200
Neuromorphic Vision
/dvs/events
dvs_msgs/EventArray
30
/dvs/image_raw/compressed
sensor_msgs/CompressedImage
30
/dvs/event_rendering/compressed
sensor_msgs/CompressedImage
30
/dvs/imu
sensor_msgs/IMU
200
AHRS
/imu/data
sensor_msgs/Imu
200
/imu/mag
sensor_msgs/MagneticField
50
DVL
/dvl/data
dvl_a50_2/DVL
12
/dvl/velocity
sensor_msgs/Imu
12
/dvl/position
sensor_msgs/Imu
4
Pressure
/pressure_sensor/depth
sensor_msgs/FluidPressure
60
Bonus
/robotview/monocular
sensor_msgs/CompressedImage
30
/waterview/monocular
sensor_msgs/CompressedImage
30
Benchmark Evaluation
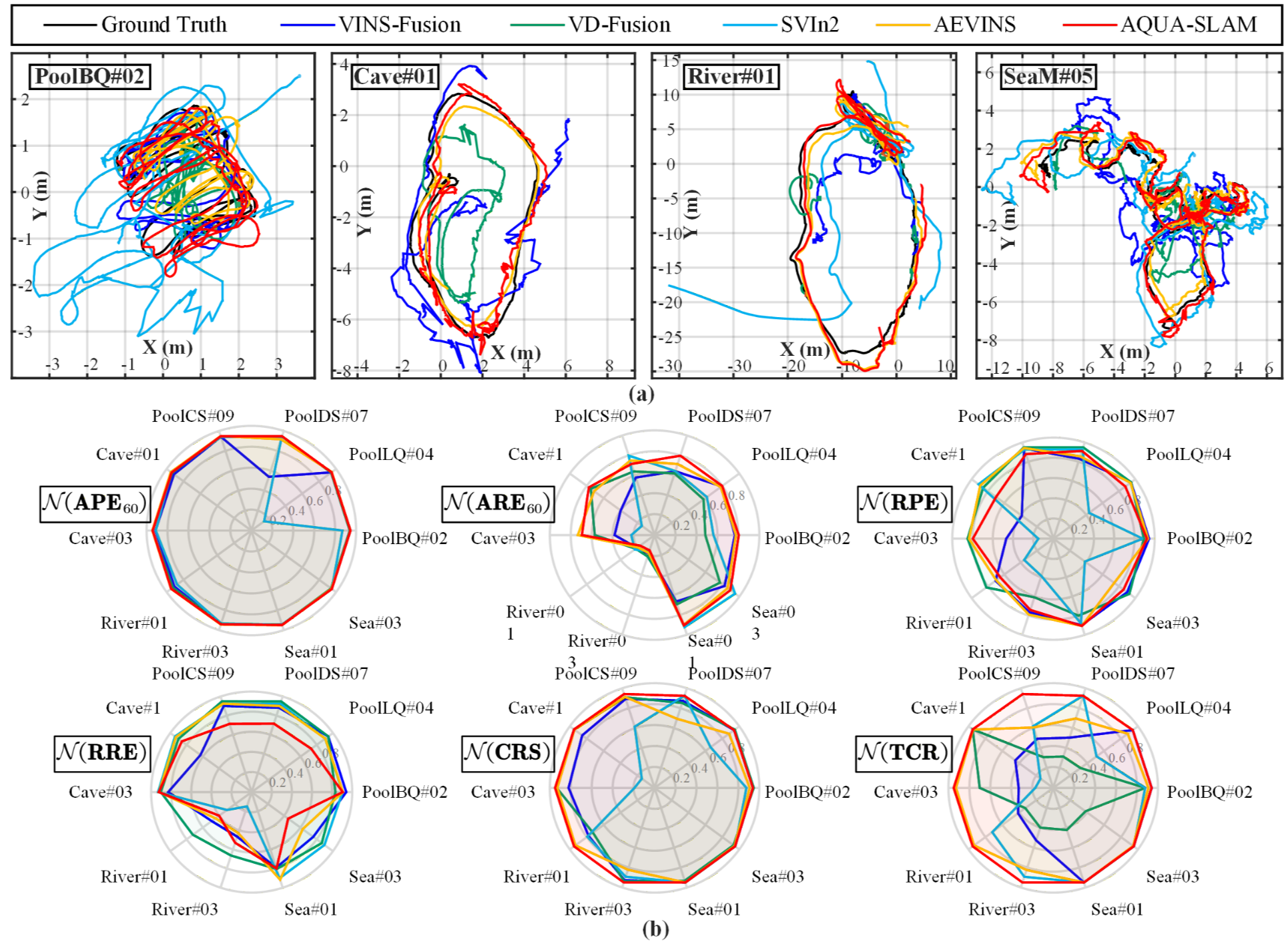
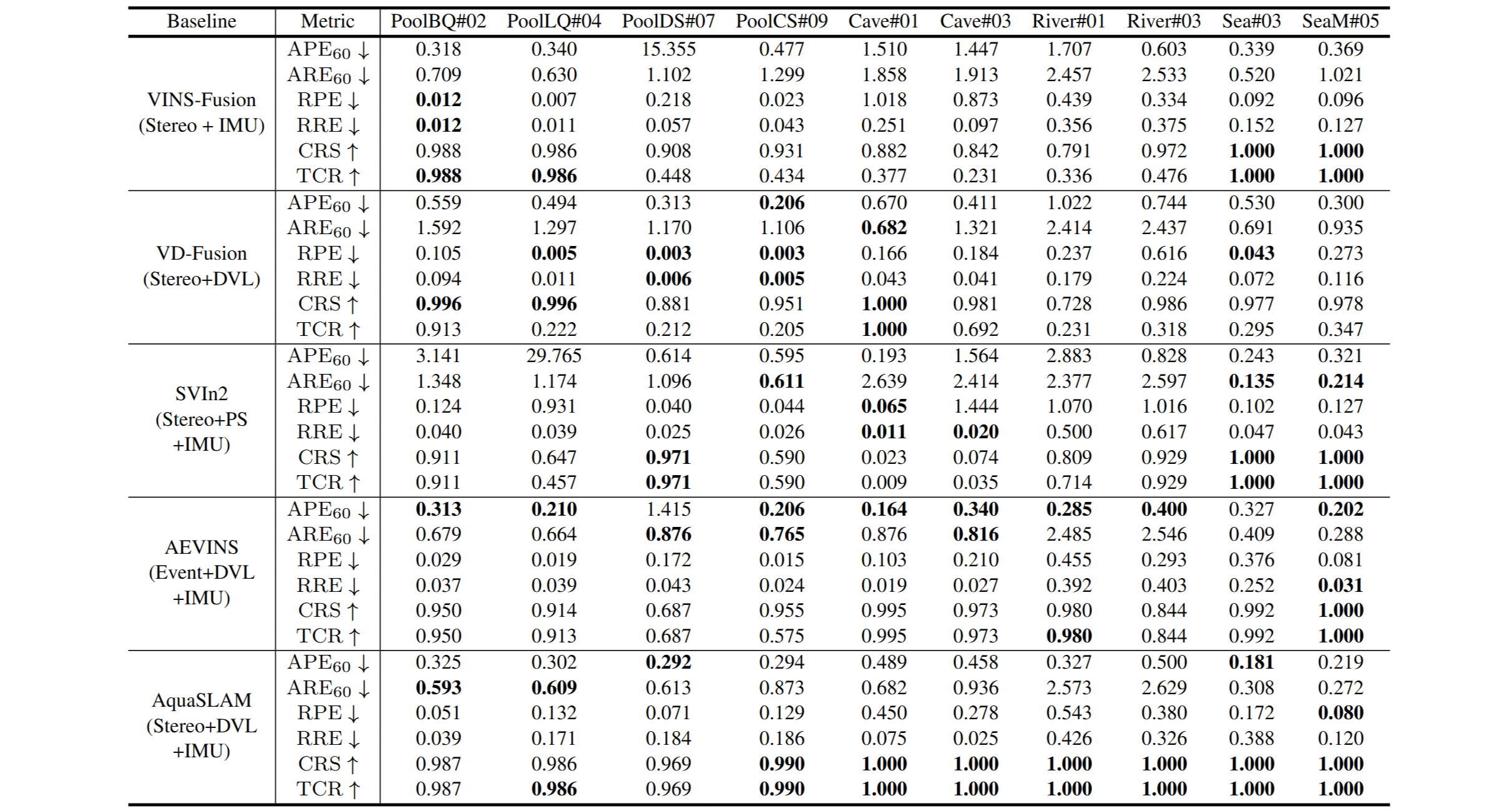
Localization Evaluation
We evaluate classical and multi-modal visual-inertial SLAM systems including
VINS-Fusion, SVIn2, VD-Fusion, AEVINS and AquaSLAM.
These methods represent state-of-the-art pipelines combining stereo vision, IMU, DVL, and event cameras.
Five baseline method localization evaluation results in the AquaTriV dataset.
Metrics include APE, ARE, RPE, RRE for accuracy, and CRS/TCR for robustness and tracking continuity.
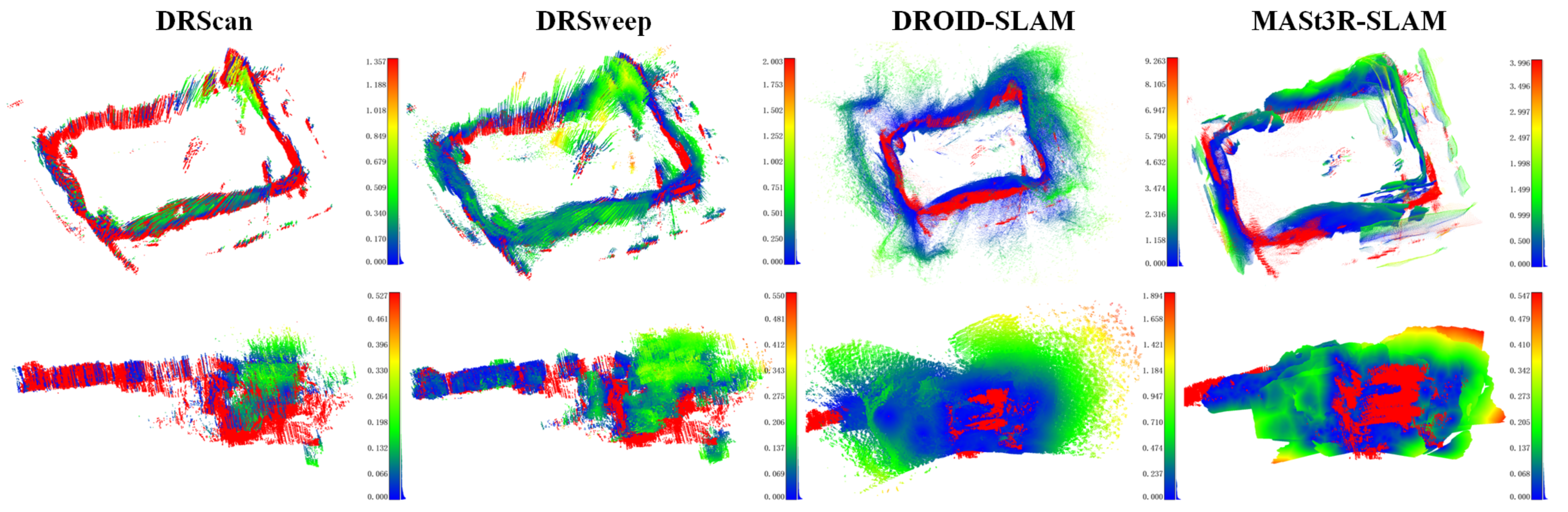
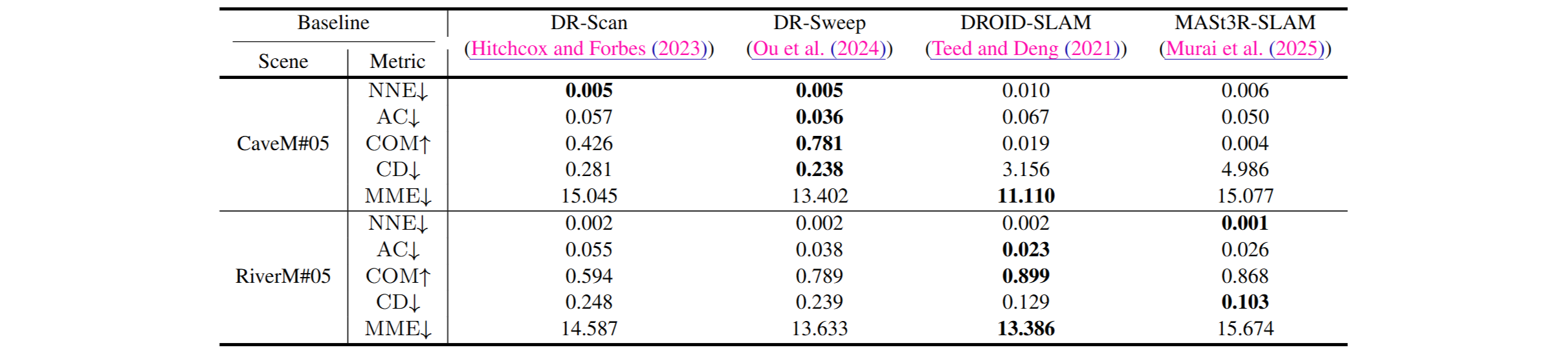
Dense Mapping Evaluation
We compare representative dense mapping and neural reconstruction baselines, including
DR-Scan, DR-Sweep, DROID-SLAM, and MASt3R-SLAM,
covering both geometric and learning-based approaches.
Four baseline method dense mapping evaluation results in the AquaTriV dataset.
Evaluation metrics include nearest neighbor error (NNE), completeness (COM), accuracy (AC),
Chamfer distance (CD), and mesh metric error (MME).
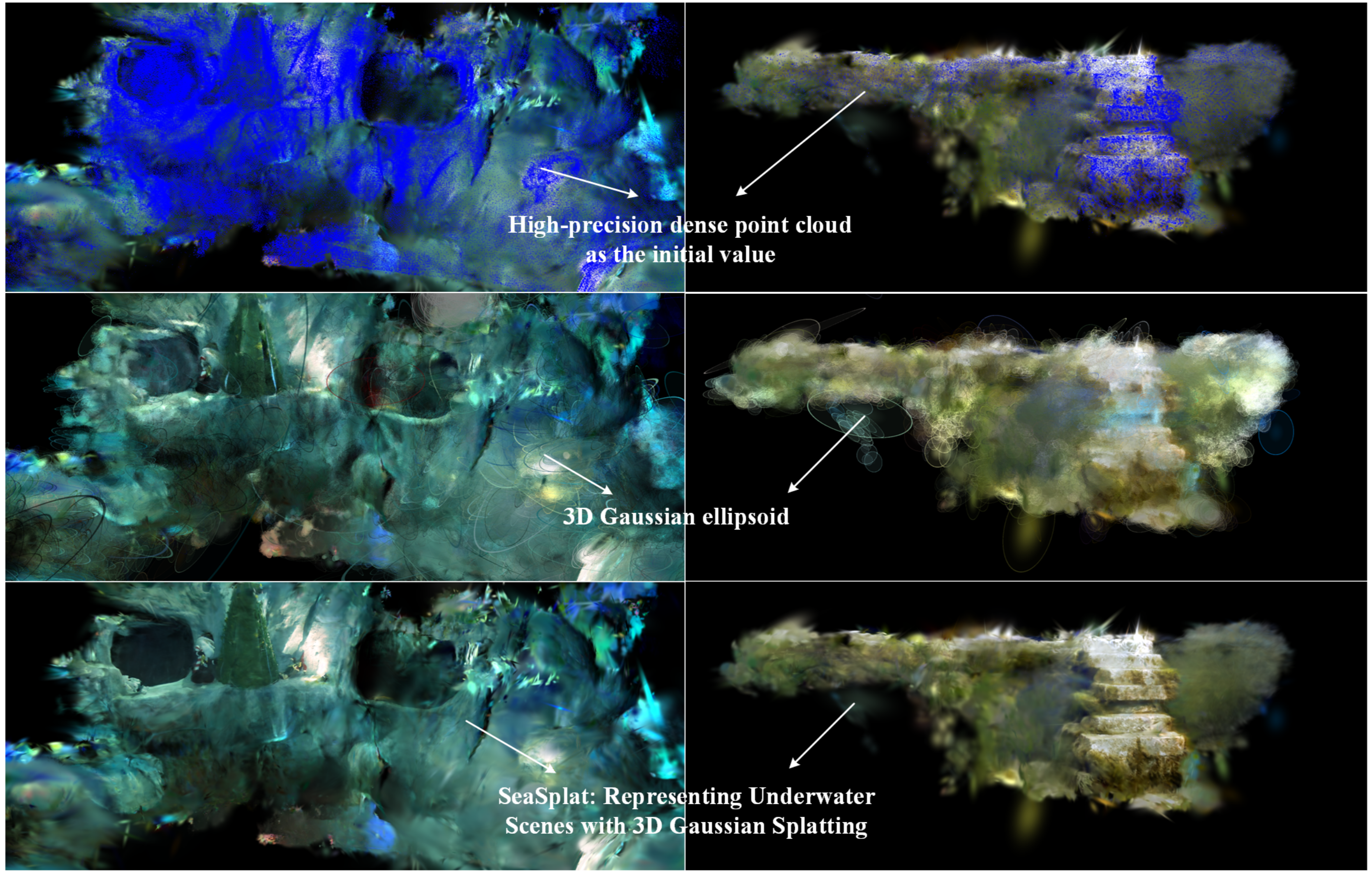
Neural Reconstruction
Recent neural rendering approaches, particularly 3D Gaussian Splatting (3DGS), require stable and sufficiently dense geometric priors, which are often lacking in underwater datasets relying on sparse SfM-based reconstructions. By deploying SeaSplat on AquaTriV and leveraging dense laser-scanned point clouds for initialization, we achieve stable optimization and high-fidelity photo-realistic reconstruction across diverse underwater scenes.